Learning Objectives
By the end of this section, you will be able to:
- Describe vectors in two and three dimensions in terms of their components, using unit vectors along the axes.
- Distinguish between the vector components of a vector and the scalar components of a vector.
- Explain how the magnitude of a vector is defined in terms of the components of a vector.
- Identify the direction angle of a vector in a plane.
- Explain the connection between polar coordinates and Cartesian coordinates in a plane.
Vectors are usually described in terms of their components in a coordinate system. Even in everyday life we naturally invoke the concept of vector components in a rectangular coordinate system. For example, if you ask someone for directions to a particular location, you will more likely be told to go 40 km east and 30 km north than 50 km in the direction 37° north of east.
In a rectangular (Cartesian) xy-coordinate system in a plane, a point in a plane is described by a pair of coordinates (x, y). In a similar fashion, a vector A⃗ in a plane is described by a pair of its vector coordinates. The x-coordinate of vector A⃗ is called its x-component and the y-coordinate of vector A⃗ is called its y-component. The vector x-component is a vector denoted by A⃗ x. The vector y-component is a vector denoted by A⃗ y. In the Cartesian system, the x and y vector components of a vector are the orthogonal projections, as illustrated in Figure 2.16, of this vector onto the x– and y-axes, respectively. In this way, following the parallelogram rule for vector addition, each vector on a Cartesian plane can be expressed as the vector sum of its vector components:
2.10
As illustrated in Figure 2.16, vector A⃗ is the diagonal of the rectangle where the x-component A⃗ x is the side parallel to the x-axis and the y-component A⃗ y is the side parallel to the y-axis. Vector component A⃗ x is orthogonal to vector component A⃗ y.
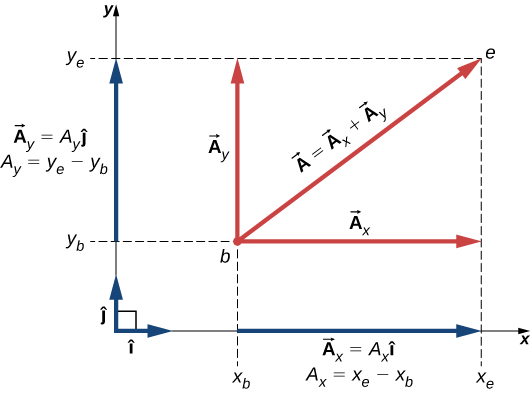
Figure 2.16 Vector A⃗ in a plane in the Cartesian coordinate system is the vector sum of its vector x– and y-components. The x-vector component A⃗ x is the orthogonal projection of vector A⃗ onto the x-axis. The y-vector component A⃗ y is the orthogonal projection of vector A⃗ onto the y-axis. The numbers Ax and Ay that multiply the unit vectors are the scalar components of the vector.
It is customary to denote the positive direction on the x-axis by the unit vector iˆ and the positive direction on the y-axis by the unit vector jˆ. Unit vectors of the axes, iˆ and jˆ, define two orthogonal directions in the plane. As shown in Figure 2.16, the x– and y– components of a vector can now be written in terms of the unit vectors of the axes:
2.11
The vectors A⃗ x and A⃗ y defined by Equation 2.11 are the vector components of vector A⃗ . The numbers Ax and Ay that define the vector components in Equation 2.11 are the scalar components of vector A⃗ . Combining Equation 2.10 with Equation 2.11, we obtain the component form of a vector:
2.12
If we know the coordinates b(xb,yb) of the origin point of a vector (where b stands for “beginning”) and the coordinates e(xe,ye) of the end point of a vector (where e stands for “end”), we can obtain the scalar components of a vector simply by subtracting the origin point coordinates from the end point coordinates:
2.13
EXAMPLE 2.3
Displacement of a Mouse Pointer
A mouse pointer on the display monitor of a computer at its initial position is at point (6.0 cm, 1.6 cm) with respect to the lower left-side corner. If you move the pointer to an icon located at point (2.0 cm, 4.5 cm), what is the displacement vector of the pointer?
Strategy
The origin of the xy-coordinate system is the lower left-side corner of the computer monitor. Therefore, the unit vector iˆ on the x-axis points horizontally to the right and the unit vector jˆ on the y-axis points vertically upward. The origin of the displacement vector is located at point b(6.0, 1.6) and the end of the displacement vector is located at point e(2.0, 4.5). Substitute the coordinates of these points into Equation 2.13 to find the scalar components Dx and Dy of the displacement vector D⃗ . Finally, substitute the coordinates into Equation 2.12 to write the displacement vector in the vector component form.
Solution
We identify xb=6.0, xe=2.0, yb=1.6, and ye=4.5, where the physical unit is 1 cm. The scalar x– and y-components of the displacement vector are:
The vector component form of the displacement vector is:
2.14
This solution is shown in Figure 2.17.
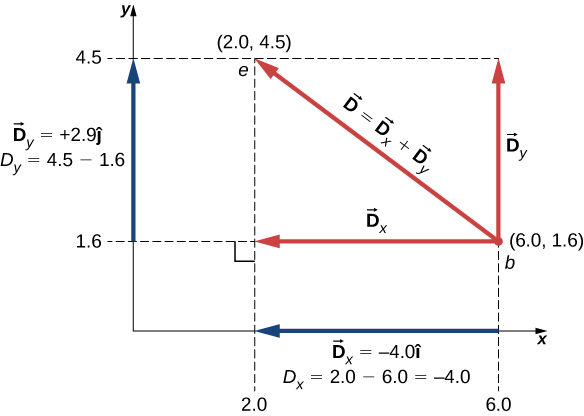
Figure 2.17 The graph of the displacement vector. The vector points from the origin point at b to the end point at e.
Significance
Notice that the physical unit — here, 1 cm—can be placed either with each component immediately before the unit vector or globally for both components, as in Equation 2.14. Often, the latter way is more convenient because it is simpler.
The vector x-component D⃗ x=−4.0iˆ=4.0(−iˆ) of the displacement vector has the magnitude |D⃗ x| = |- 4.0| |iˆ| = 4.0 because the magnitude of the unit vector is |iˆ|=1. Notice, too, that the direction of the x-component is −iˆ, which is antiparallel to the direction of the +x-axis; hence, the x-component vector D⃗ x points to the left, as shown in Figure 2.17. The scalar x-component of vector D⃗ is Dx = −4.0.
Similarly, the vector y-component D⃗ y=+2.9jˆ of the displacement vector has magnitude |D⃗ y| = |2.9| |jˆ| = 2.9 because the magnitude of the unit vector is |jˆ| = 1. The direction of the y-component is +jˆ, which is parallel to the direction of the +y-axis. Therefore, the y-component vector D⃗ y points up, as seen in Figure 2.17. The scalar y-component of vector D⃗ is Dy=+2.9. The displacement vector D⃗ is the resultant of its two vector components.
The vector component form of the displacement vector Equation 2.14 tells us that the mouse pointer has been moved on the monitor 4.0 cm to the left and 2.9 cm upward from its initial position.
CHECK YOUR UNDERSTANDING 2.4
A blue fly lands on a sheet of graph paper at a point located 10.0 cm to the right of its left edge and 8.0 cm above its bottom edge and walks slowly to a point located 5.0 cm from the left edge and 5.0 cm from the bottom edge. Choose the rectangular coordinate system with the origin at the lower left-side corner of the paper and find the displacement vector of the fly. Illustrate your solution by graphing.
When we know the scalar components Ax and Ay of a vector A⃗ , we can find its magnitude A and its direction angle θA. The direction angle — or direction, for short — is the angle the vector forms with the positive direction on the x-axis. The angle θA is measured in the counterclockwise direction from the +x-axis to the vector (Figure 2.18). Because the lengths A, Ax, and Ay form a right triangle, they are related by the Pythagorean theorem:
2.15
This equation works even if the scalar components of a vector are negative. The direction angle θA of a vector is defined via the tangent function of angle θA in the triangle shown in Figure 2.18:
2.16
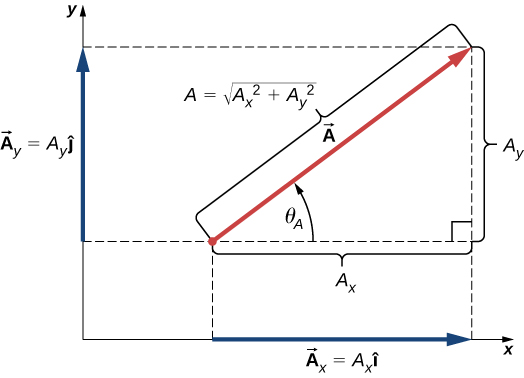
Figure 2.18 When the vector lies either in the first quadrant or in the fourth quadrant, where component Ax is positive (Figure 2.19), the direction angle θA in Equation 2.16) is identical to the angle θ.
When the vector lies either in the first quadrant or in the fourth quadrant, where component Ax is positive (Figure 2.19), the angle θ in Equation 2.16 is identical to the direction angle θA. For vectors in the fourth quadrant, angle θ is negative, which means that for these vectors, direction angle θA is measured clockwise from the positive x-axis. Similarly, for vectors in the second quadrant, angle θ is negative. When the vector lies in either the second or third quadrant, where component Ax is negative, the direction angle is θA = θ+180° (Figure 2.19).
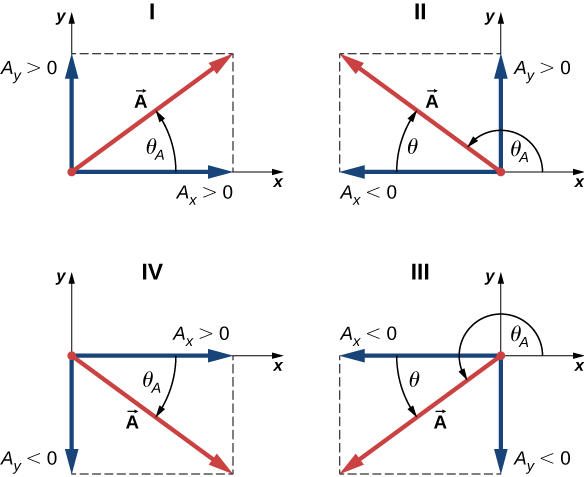
Figure 2.19 Scalar components of a vector may be positive or negative. Vectors in the first quadrant (I) have both scalar components positive and vectors in the third quadrant have both scalar components negative. For vectors in quadrants II and III, the direction angle of a vector is θA = θ+180°.
EXAMPLE 2.4
Magnitude and Direction of the Displacement Vector
You move a mouse pointer on the display monitor from its initial position at point (6.0 cm, 1.6 cm) to an icon located at point (2.0 cm, 4.5 cm). What are the magnitude and direction of the displacement vector of the pointer?
Strategy
In Example 2.3, we found the displacement vector D⃗ of the mouse pointer (see Equation 2.14). We identify its scalar components Dx = −4.0 cm and Dy = +2.9cm and substitute into Equation 2.15 and Equation 2.16 to find the magnitude D and direction θD, respectively.
Solution
The magnitude of vector D⃗ is:
The direction angle is:
Vector D⃗ lies in the second quadrant, so its direction angle is:
CHECK YOUR UNDERSTANDING 2.5
If the displacement vector of a blue fly walking on a sheet of graph paper is D⃗ =(−5.00 iˆ−3.00jˆ)cm, find its magnitude and direction.
In many applications, the magnitudes and directions of vector quantities are known and we need to find the resultant of many vectors. For example, imagine 400 cars moving on the Golden Gate Bridge in San Francisco in a strong wind. Each car gives the bridge a different push in various directions and we would like to know how big the resultant push can possibly be. We have already gained some experience with the geometric construction of vector sums, so we know the task of finding the resultant by drawing the vectors and measuring their lengths and angles may become intractable pretty quickly, leading to huge errors. Worries like this do not appear when we use analytical methods. The very first step in an analytical approach is to find vector components when the direction and magnitude of a vector are known.
Let us return to the right triangle in Figure 2.18. The quotient of the adjacent side Ax to the hypotenuse A is the cosine function of direction angle θA, Ax/A = cos θA, and the quotient of the opposite side Ay to the hypotenuse A is the sine function of θA, Ay/A = sin θA. When magnitude A and direction θA are known, we can solve these relations for the scalar components:
2.17
When calculating vector components with Equation 2.17, care must be taken with the angle. The direction angle θA of a vector is the angle measured counterclockwise from the positive direction on the x-axis to the vector. The clockwise measurement gives a negative angle.
EXAMPLE 2.5
Components of Displacement Vectors
A rescue party for a missing child follows a search dog named Trooper. Trooper wanders a lot and makes many trial sniffs along many different paths. Trooper eventually finds the child and the story has a happy ending, but his displacements on various legs seem to be truly convoluted. On one of the legs he walks 200.0 m southeast, then he runs north some 300.0 m. On the third leg, he examines the scents carefully for 50.0 m in the direction 30°30° west of north. On the fourth leg, Trooper goes directly south for 80.0 m, picks up a fresh scent and turns 23°23° west of south for 150.0 m. Find the scalar components of Trooper’s displacement vectors and his displacement vectors in vector component form for each leg.
Strategy
Let’s adopt a rectangular coordinate system with the positive x-axis in the direction of geographic east, with the positive y-direction pointed to geographic north. Explicitly, the unit vector iˆ of the x-axis points east and the unit vector jˆ of the y-axis points north. Trooper makes five legs, so there are five displacement vectors. We start by identifying their magnitudes and direction angles, then we use Equation 2.17 to find the scalar components of the displacements and Equation 2.12 for the displacement vectors.
Solution
On the first leg, the displacement magnitude is L1 = 200.0 m and the direction is southeast. For direction angle θ1 we can take either 45° measured clockwise from the east direction or 45°+270 measured counterclockwise from the east direction. With the first choice, θ1 = −45°. With the second choice, θ1 = +315°. We can use either one of these two angles. The components are:
The displacement vector of the first leg is:
On the second leg of Trooper’s wanderings, the magnitude of the displacement is L2 = 300.0 m and the direction is north. The direction angle is θ2 = +90°. We obtain the following results:
On the third leg, the displacement magnitude is L3 = 50.0 m and the direction is 30° west of north. The direction angle measured counterclockwise from the eastern direction is θ3 = 30°+90° = +120°. This gives the following answers:
On the fourth leg of the excursion, the displacement magnitude is L4 = 80.0 m and the direction is south. The direction angle can be taken as either θ4 = −90° or θ4 = +270°. We obtain:
On the last leg, the magnitude is L5 = 150.0 m and the angle is θ5 = −23°+270° = +247° (23° west of south), which gives:
CHECK YOUR UNDERSTANDING 2.6
If Trooper runs 20 m west before taking a rest, what is his displacement vector?
Polar Coordinates
To describe locations of points or vectors in a plane, we need two orthogonal directions. In the Cartesian coordinate system these directions are given by unit vectors iˆ and jˆ along the x-axis and the y-axis, respectively. The Cartesian coordinate system is very convenient to use in describing displacements and velocities of objects and the forces acting on them. However, it becomes cumbersome when we need to describe the rotation of objects. When describing rotation, we usually work in the polar coordinate system.
In the polar coordinate system, the location of point P in a plane is given by two polar coordinates (Figure 2.20). The first polar coordinate is the radial coordinate r, which is the distance of point P from the origin. The second polar coordinate is an angle φ that the radial vector makes with some chosen direction, usually the positive x-direction. In polar coordinates, angles are measured in radians, or rads. The radial vector is attached at the origin and points away from the origin to point P. This radial direction is described by a unit radial vector rˆ. The second unit vector tˆ is a vector orthogonal to the radial direction rˆ. The positive +tˆ direction indicates how the angle φ changes in the counterclockwise direction. In this way, a point P that has coordinates (x, y) in the rectangular system can be described equivalently in the polar coordinate system by the two polar coordinates (r,φ). Equation 2.17 is valid for any vector, so we can use it to express the x– and y-coordinates of vector r⃗ . In this way, we obtain the connection between the polar coordinates and rectangular coordinates of point P:
2.18
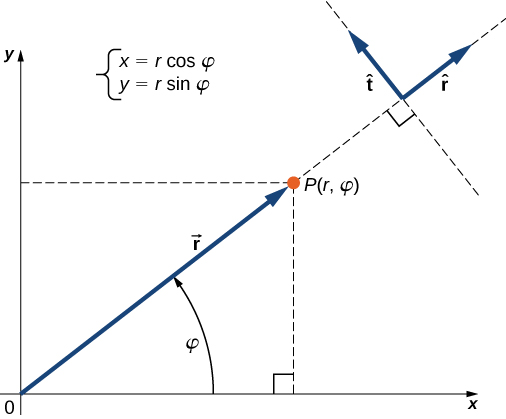
Figure 2.20 Using polar coordinates, the unit vector rˆ defines the positive direction along the radius r (radial direction) and, orthogonal to it, the unit vector tˆ defines the positive direction of rotation by the angle φ.
EXAMPLE 2.6
Polar Coordinates
A treasure hunter finds one silver coin at a location 20.0 m away from a dry well in the direction 20° north of east and finds one gold coin at a location 10.0 m away from the well in the direction 20° north of west. What are the polar and rectangular coordinates of these findings with respect to the well?
Strategy
The well marks the origin of the coordinate system and east is the +x-direction. We identify radial distances from the locations to the origin, which are rS = 20.0 m (for the silver coin) and rG = 10.0 m (for the gold coin). To find the angular coordinates, we convert 20° to radians: 20° = π 20/180 = π / 9. We use Equation 2.18 to find the x– and y-coordinates of the coins.
Solution
The angular coordinate of the silver coin is φS = π/9, whereas the angular coordinate of the gold coin is φG = π − π/9 = 8π / 9. Hence, the polar coordinates of the silver coin are (rS,φS)=(20.0m, π/9) and those of the gold coin are (rG,φG) = (10.0 m, 8 π/9). We substitute these coordinates into Equation 2.18 to obtain rectangular coordinates. For the gold coin, the coordinates are:
For the silver coin, the coordinates are:
Vectors in Three Dimensions
To specify the location of a point in space, we need three coordinates (x, y, z), where coordinates x and y specify locations in a plane, and coordinate z gives a vertical position above or below the plane. Three-dimensional space has three orthogonal directions, so we need not two but three unit vectors to define a three-dimensional coordinate system. In the Cartesian coordinate system, the first two unit vectors are the unit vector of the x-axis iˆ and the unit vector of the y-axis jˆ. The third unit vector kˆ is the direction of the z-axis (Figure 2.21). The order in which the axes are labeled, which is the order in which the three unit vectors appear, is important because it defines the orientation of the coordinate system. The order x–y–z, which is equivalent to the order iˆ – jˆ – kˆ, defines the standard right-handed coordinate system (positive orientation). Notice that while previously the y-axis was used for the upward direction, in three dimensions we usually choose z to represent the vertical. A right-handed coordinate system with z up and with one of the remaining axes pointing to the right and the other out of the page must have the y-axis pointing right and x out of the page, as illustrated here.
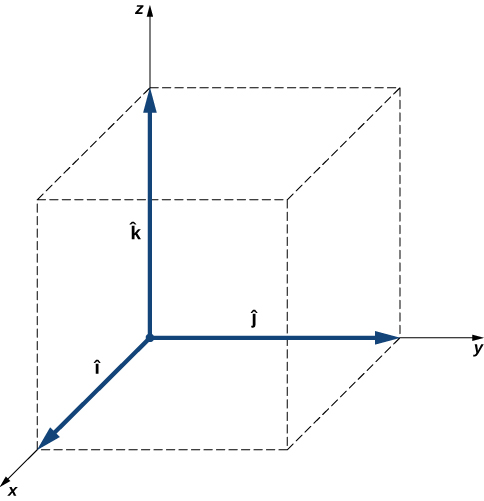
Figure 2.21 Three unit vectors define a Cartesian system in three-dimensional space. The order in which these unit vectors appear defines the orientation of the coordinate system. The order shown here defines the right-handed orientation.
In three-dimensional space, vector A⃗ has three vector components: the x-component A⃗ x = Axiˆ, which is the part of vector A⃗ along the x-axis; the y-component A⃗ y = Ayjˆ, which is the part of A⃗ along the y-axis; and the z-component A⃗ z = Azkˆ, which is the part of the vector along the z-axis. A vector in three-dimensional space is the vector sum of its three vector components (Figure 2.22):
2.19
If we know the coordinates of its origin b(xb,yb,zb) and of its end e(xe,ye,ze), its scalar components are obtained by taking their differences: Ax and Ay are given by Equation 2.13 and the z-component is given by:
2.20
Magnitude A is obtained by generalizing Equation 2.15 to three dimensions:
2.21
This expression for the vector magnitude comes from applying the Pythagorean theorem twice. As seen in Figure 2.22, the diagonal in the xy-plane has length √(A2x+A2y) and its square adds to the square A2z to give A2. Note that when the z-component is zero, the vector lies entirely in the xy-plane and its description is reduced to two dimensions.
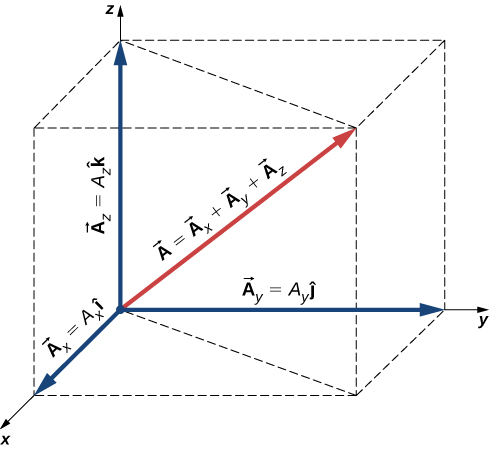
Figure 2.22 A vector in three-dimensional space is the vector sum of its three vector components.
EXAMPLE 2.7
Takeoff of a Drone
During a takeoff of IAI Heron (Figure 2.23), its position with respect to a control tower is 100 m above the ground, 300 m to the east, and 200 m to the north. One minute later, its position is 250 m above the ground, 1200 m to the east, and 2100 m to the north. What is the drone’s displacement vector with respect to the control tower? What is the magnitude of its displacement vector?

Figure 2.23 The drone IAI Heron in flight. (credit: SSgt Reynaldo Ramon, USAF)
Strategy
We take the origin of the Cartesian coordinate system as the control tower. The direction of the +x-axis is given by unit vector iˆ to the east, the direction of the +y-axis is given by unit vector jˆ to the north, and the direction of the +z-axis is given by unit vector kˆ, which points up from the ground. The drone’s first position is the origin (or, equivalently, the beginning) of the displacement vector and its second position is the end of the displacement vector.
Solution
We identify b(300.0 m, 200.0 m, 100.0 m) and e(1200 m, 2100 m, 250 m), and use Equation 2.13 and Equation 2.20 to find the scalar components of the drone’s displacement vector:
We substitute these components into Equation 2.19 to find the displacement vector:
We substitute into Equation 2.21 to find the magnitude of the displacement:
CHECK YOUR UNDERSTANDING 2.7
If the average velocity vector of the drone in the displacement in Example 2.7 is:
What is the magnitude of the drone’s velocity vector?

